近日,南方科技大学机械与能源工程系副教授胡程志课题组在胶囊机器人的多功能集成领域取得新进展,相关成果以“Rotating Multibarreled Capsule Robot for Multiple Biopsies and On-Demand Drug Delivery”为题发表在国际期刊 IEEE/ASME Transactions on Mechatronics 上。活检取样和药物递送是胶囊机器人的关键功能,将多种功能集成到同一个机器人中对促进消化道疾病的诊断和治疗一体化进程具有重要意义。
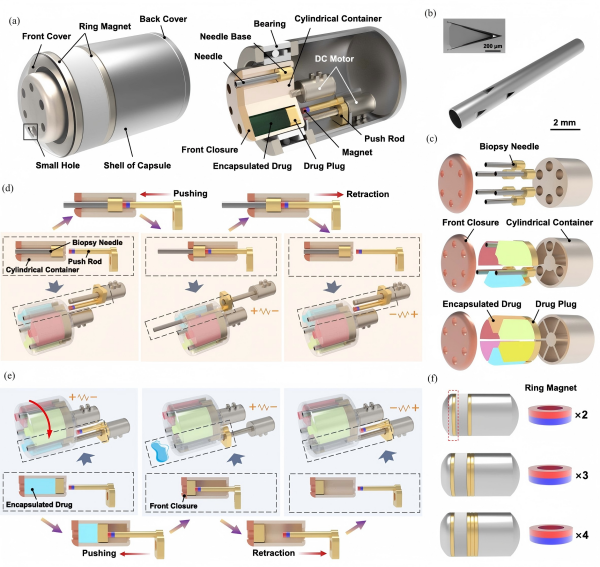
图1 机器人结构及工作原理展示
胡程志课题组提出了一款基于旋转多舱室结构的胶囊机器人,位于机器人前部的容器设计有多个舱室,每个舱室可独立放置活检针或药物,多样的组合方式为满足临床诊断和治疗的特定需求提供了可能性。机器人后部的丝杆机构能够可控地将活检针推出或者分段释放药物,为功能触发提供着可靠、高效的保障。
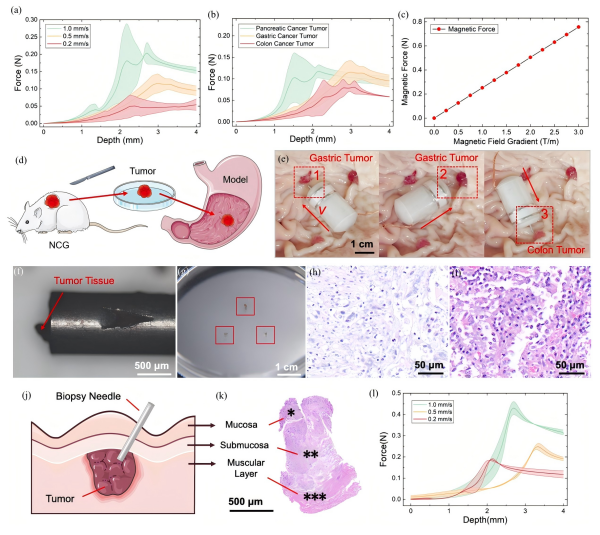
图2 机器人体外活检实验结果
研究团队进一步利用该机器人完成了多靶点位置的体外活检实验,具有独特结构设计的活检针提高了采样成功率,活检深度可达消化道粘膜下层,单个样本体积约为0.6mm3,HE染色结果证明成功采集到了肿瘤组织,具备医学诊断价值。
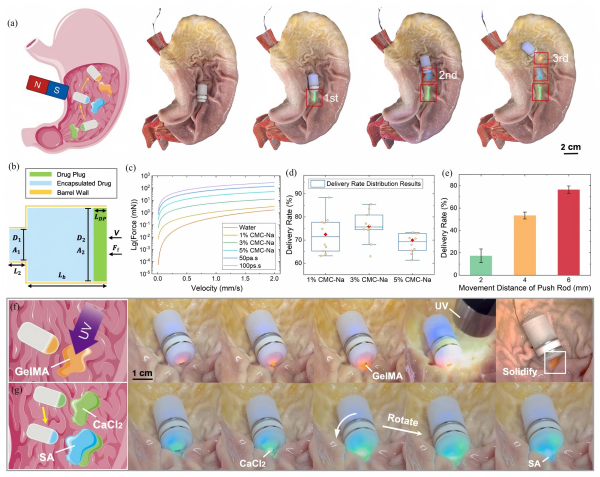
图3 机器人药物递送实验结果
该机器人的药物递送功能同样在体外实验环境中得到了验证,药物平均递送率达到了75% ,并且实现了可控的分段式递送。根据机器人可以携带多种药物的特点,开发了基于紫外光固化以及离子交联固化两种原理的药物敷料治疗方法。
南科大机械与能源工程系硕士研究生李宗泽为论文第一作者,胡程志副教授和天津大学史超阳教授为论文共同通讯作者,南方科技大学为论文第一单位。此项研究得到了国家自然科学基金,国家重点研发青年项目,广东省基础与应用基础研究基金,深圳市科技计划项目支持。
论文链接: https://ieeexplore.ieee.org/document/10899412